

海底观测仪网的工作环境为深海数千米海底,想通过装备耐压潜水服的人来完成是不现实的,因此需要ROV用以替代人来实现海底线缆布网、设备安装连接以及维修。除了应用于海底观测网的建造外,全球范围内ROV还被广泛用于被广泛应用于海岸警卫、海事、海关、核电、水电、海洋石油、渔业、海上救助、管线探测等各个领域。
海底工作环境复杂恶劣,深海水压高,能见度低,因此为实现相关海底作业要求,对ROV有多项技术要求,包括运动控制技术、导航定位技术、视觉传感技术、仿真技术及特殊功能扩展技术等。ROV的设计是一项综合性的复杂工程,技术密集度高,是公认的高科技,其研制水平体现了一个国家的综合技术力量。
ROV关键技术的要求和难点
技术 | 技术要求 | 技术难点 |
运动控制技术 | 稳定流畅控制ROV航行、手臂作业等 | 深海下运动惯性大、海流随机干扰,机械臂作业影响整机运动,从而导致重心、浮心变化 |
导航定位技术 | 精确导航和定位 | 由于非线性动力学特性及水介质的特殊性,导航精度、可靠性差 |
视觉传感技术 | 数据可视化,实时现场画面 | 海底水质重度浑浊时环境探测困难 |
仿真技术 | 对ROV设计阶段进行测试 | 海底环境复杂,建立相同或类似的仿真评估平台困难 |
特殊功能扩展技术 | 设置多种功能扩展的开放接口 | 整机机械、电子设计本身就较为复杂,再搭载其他特殊功能比较困难 |
数据来源:公开资料整理
相关报告:智研咨询发布的《2018-2024年中国水下机器人(ROV)行业市场深度调查及投资前景分析报告》
我国ROV的研究始于七十年代末1985年12月,我国第一台水下机器人“海人一号”样机首航成功。近二十年来,我国的水下机器人研究有了飞速发展,目前已攻克各项关键技术,能够制造大中小型各种ROV,总体性能达到世界领先水平。但我国ROV产业尚未成熟,行业仍处萌芽阶段,未来有待加快发展。
我国ROV发展历程
时间 | 事件 |
1985年 | 我国第一台水下机器人“海人一号”样机首航成功 |
1994年 | 我国第一艘无缆水下机器人“探索者”号,下潜深度达到1000米 |
2009年 | 国家重大科技专项“海龙号”成功应用于“大洋一号”21航次第三航段的深海热液科考任务,标志着我国ROV技术从性能和控制方式上超越国际同类型,总体性能达到世界领先水平。 |
2014年 | 由中科院沈阳自动化所研制的“北极ARV”水下机器人完成了海冰厚度、冰底形态、海洋环境等参数的测量工作。 |
2014年 | 中国自主研制的首台4500米级深海遥控无人潜水器作业系统“海马号”,2014年4月22日在南海完成海上试验,并通过海上验收。“海马号”项目是科技部通过 863计划支持的重点项目,是中国自主研发的下潜深度最大、国产化率最高的无人遥控潜水器系统。 |
2016年 | 重载作业型无人遥控潜水器“海象-1500”ROV已完成海试,将投入功能性应用试验。其作为中国重大工程装备纳入南海深水油气资源开发的作业体系,标志着中国 已完全攻克重载型ROV的各项关键技术 |
2017年 | 中科院研制智能水下机器人,具有活动范围大、机动灵活、隐蔽性好等优点,搭载了很多传感器,可以用来探测海底地形地貌;采用非回转体、立扁鱼形外形设计, 可回转式推进器布局,具有阻力小、操纵性好等优点;全长4.98米,总高1.66米,最大工作水深4500米,水下续航能力20小时。 |
数据来源:公开资料整理
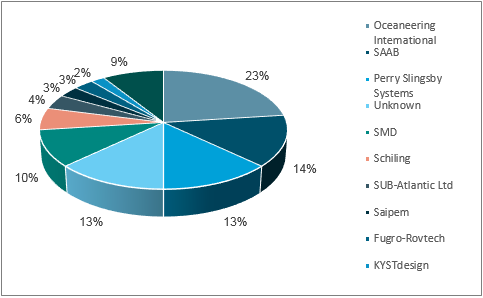
全球ROV市场份额分布
数据来源:公开资料整理
 智研咨询 - 精品报告
智研咨询 - 精品报告

2024-2030年中国水下机器人行业市场深度分析及投资决策建议报告
《2024-2030年中国水下机器人行业市场深度分析及投资决策建议报告》共十七章,包含2024-2030年水下机器人行业投资机会与风险分析,2024-2030年水下机器人行业投资战略研究,2024-2030年水下机器人行业投资指导等内容。
文章转载、引用说明:
智研咨询推崇信息资源共享,欢迎各大媒体和行研机构转载引用。但请遵守如下规则:
1.可全文转载,但不得恶意镜像。转载需注明来源(智研咨询)。
2.转载文章内容时不得进行删减或修改。图表和数据可以引用,但不能去除水印和数据来源。
如有违反以上规则,我们将保留追究法律责任的权力。
版权提示:
智研咨询倡导尊重与保护知识产权,对有明确来源的内容注明出处。如发现本站文章存在版权、稿酬或其它问题,烦请联系我们,我们将及时与您沟通处理。联系方式:gaojian@chyxx.com、010-60343812。





