

自动驾驶作为人工智能有最快有望落地的一项应用,已经成为不可阻挡的科技趋势。而在实现完全自动驾驶之前,智能驾驶聚焦于提升驾驶者的驾驶体验,通过先进汽车电子技术和人工智能手段,为驾驶者带来清晰的驾驶信息、直觉的人机交互和智能的驾驶辅助。
智能驾驶的发展既能够迅速满足当前汽车消费者的驾驶需求,也能够为构建未来自动驾驶环境下的驾驶空间提供尝试。目前,IT 厂商、供应商、整车厂商在大力拓展自动驾驶研发之外,已将智能驾驶作为新战场加速前进。
智能驾驶的中央控制系统、仪表盘等驾驶操作与信息交互系统不断进化。传统汽车中,这些系统之间功能分离、信息分散,同时人与汽车的交互方式较为简单直接。随着技术进步和汽车电子发展,汽车添加了更多的功能系统,驾驶员能够在驾驶舱中获知更多的信息,但是分离式的驾驶舱布局体系使得驾驶者难以有效处理和掌握更多的功能与信息,反而降低了驾驶者的驾驶体验。 如何为驾驶者提供更加丰富的驾驶支持,同时创造更加舒适的驾驶空间,成为智能驾驶构建面对的主要问题。 从独立到互联再到未来走向集成,汽车驾驶空间正在不断经历变革和进化。
智能驾驶以硬件整合、信息融合和直觉化的人机交互体系为核心特点,集成车载信息娱乐、液晶仪表、抬头显示(HUD)和后座娱乐等系统于一体的驾驶人机交互系统。基于强大的芯片计算能力和虚拟化技术,能够实现中控屏+液晶仪表+HUD+后座娱乐屏幕的多屏互动与信息共享,为驾驶者提供丰富的驾驶信息的同时,带来沉浸式驾驶体验。
传统汽车中,不同的汽车电子系统如中控系统、驾驶辅助系统、车联网系统需要独立的电子控制单元ECU,并主要通过CAN总线相互连接和部署。想添加更多功能,就需要相应增加更多的 ECU。
相关报告:智研咨询发布的《2017-2022年中国智能驾驶市场供需预测及投资战略研究报告》
汽车中的ECU数量快速上升
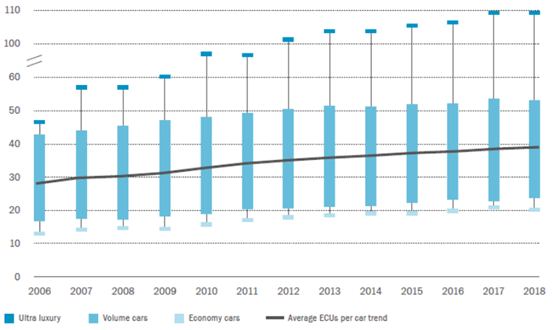
数据来源:公开资料整理
目前的汽车中大约包含20到100个ECU, 随着车子电子化程度越来越高,尤其是自动驾驶、主动安全等功能的增加,汽车的 ECU 数量会急速增加。急速增加的 ECU会降低汽车的运算和数据交换效率,同时也将会大大增加车辆成本。
采用数量更少的ECU或者是一个运算能力超强的MEGA ECU作为汽车神经中枢成为发展的必然趋势,一个整合的驾驶舱电脑将会代替众多的 ECU。智能驾驶将实现由一个系统级芯片控制器进行运算和控制,集成车内多种功能,实现汽车座舱硬件整合。
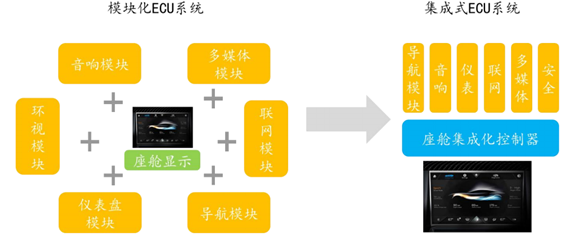
数据来源:公开资料整理
通过在硬件底层处理器上构建一个虚拟层, 实现信息娱乐系统、仪表屏系统等多操作系的同时、独立运行,从而维护整个汽车系统的安全。当娱乐系统的应用出现问题时,不会影响仪表系统的应用的正常运行。因此能够满足不同需求、有着不同安全要求的软件能够实现共存共用。同时通过虚拟技术,不同功能系统、软件之间能够图像、驱动器共享,实现中控屏、仪表屏、后座娱乐屏、HUD投影屏之间的无缝互动、信息融合。
HMI(Human-Machine Interface Technologies)即人机交互系统。该系统能够实现人与车之间的交互,车主可通过该系统把握车辆信息并对车辆实施控制。
输入端:触摸、语音控制、手势控制等多样化交互方式结合
目前以按钮与触屏为主的输入方式造成驾驶者注意力分散,智能驾驶人机交互实现触摸、语音控制、手势控制等多样化交互方式结合。智能驾驶人机交互综合采用语音控制、手势控制等多样化的技术手段,给予驾驶者更好的交互体验。
输出端:多屏融合与个性化UI设计带来直觉化交互体验
智能驾驶人机交互通过中控屏幕、液晶仪表和HUD多屏结合,以及个性化的UI界面设计为驾驶者提供清晰的信息提示。 智能驾驶人机交互采用大尺寸、高清车载显示终端,并将中控屏幕、液晶仪表和HUD多屏结合,搭配个性化UI界面设计,实现信息分块分类,整合并分析多个信息流,将需要的信息以最佳方式呈现给驾驶员,带来直觉化交互体验。
无人驾驶技术是一个涉及传感器、计算机、信息通讯、自动控制、导航定位、机器视觉、人工智能等多诸多前沿学科的综合技术。根据无人驾驶的职能模块,可将无人驾驶的关键技术分为:环境感知技术、定位导航技术、路径规划技术和决策控制技术。
环境感知技术是通过多种传感器对车辆周围的环境信息进行感知。环境信息不仅包括了车辆自身状态信息,如车辆速度、转向度、位置信息、倾角、加速度等,还包括四周环境信息,如道路位置、道路方向、障碍物位置和速度、交通标志等。
定位导航技术主要包括定位技术和导航技术。定位技术可以分为相对定位(如陀螺仪、里程计算)、绝对定位(如GPS)和组合定位。导航技术可以分为基于地图的导航和不基于地图的导航(如惯性导航)。其中高精度地图在无人驾驶的导航中起关键作用。
路径规划技术可以为无人驾驶提供最优的行车路径。无人驾驶车在行驶过程中,行车路线的确定、如何躲避障碍物、路口转向等问题都需要通过路径规划技术完成。据适用范围不同,路径规划技术通常可分为全局路径规划和局部路径规划。
决策控制技术相当于智能车的大脑,它通过综合分析环境感知系统提供的信息,对当前的车辆行为产生决策。决策技术还需要考虑车辆的机械特性、动力特性,出合理的控制策略。常用的决策技术有机器学习、神经网络、贝叶斯网络、模糊逻辑等。根据决策技术的不同,控制系统可分为反射式、反应式和综合式。
无人驾驶车的环境感知系统
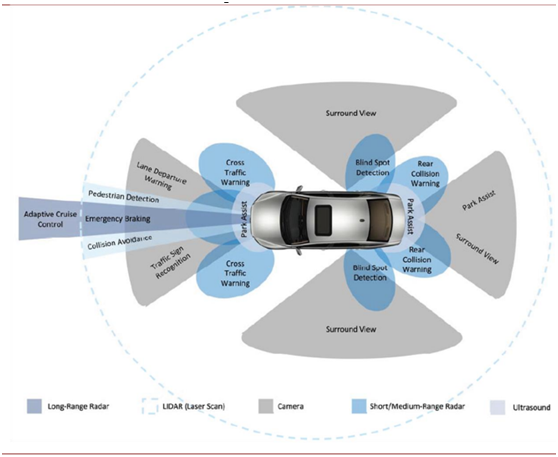
数据来源:公开资料整理
传感器是无人驾驶汽车的眼睛,用来观察行驶时环境的动态变化,无人驾驶车中不可或缺的重要组成部分,常用的传感器包括摄像头、激光雷达、超声波雷达、GPS、陀螺仪等等。最主要的两种传感器就是摄像头和激光雷达。
摄像头(Camera)作为一种已普遍应用的传感器,具有成本低廉、信息采集量大等特点,现在的摄像头的分辨率也己经达到了较高水准。
激光雷达(LIDAR)测距的优势就在于分辨率高、精确度高(可达到厘米级)、定向性好、抗有源干扰能力强,基于这些优势,激光雷达广泛应做无人驾驶、智能驾驶的传感器,缺点是价格较高。
目前顶级的激光雷达如 Velodyne 的 64 线激光雷达每台数万美元,价格较贵,但如果其产量能达到每年100万台,我们预计其价格可降至500美元/台,我们期待未来三五年后激光雷达对无人驾驶来说不再是奢侈品而得到普及。
无人驾驶更高的安全冗余需要高精度地图
高精度地图层:提供道路的斜率和曲率、车道标志和路边物体的标注;提供一个高精度的车道模型,协助车辆间距调整、安全换道、速度管理、超车等等;实现车与车之间的水平和垂直方向的精确定位。
实时道路层:现场道路层动态地跟踪道路上的事件,提供在车辆传感器范围之外的时的信息;提供与建筑物、交通拥堵、交通事故、天气灾害等等有关的动态事件;遥感数据在云中进行汇总和处理,受影响的层进行更新,使得车辆可以启用主动战略规划。
驾驶层:基于真正的人类学习驾驶模式,分析了大量的车辆传感器数据,提取合适的车辆行为配置规范;提供符合当前驾驶环境的速度规范;有助于把“机器感觉”的车辆自动化,以帮助增加驾驶员的信任。
 智研咨询 - 精品报告
智研咨询 - 精品报告

2024-2030年中国智能驾驶行业市场研究分析及发展前景分析报告
《2024-2030年中国智能驾驶行业市场研究分析及发展前景分析报告》共十三章,包含中国智能驾驶行业重点企业竞争情况分析,中国智能驾驶行业发展机遇与趋势研究分析,智能驾驶行业投资策略建议分析等内容。
文章转载、引用说明:
智研咨询推崇信息资源共享,欢迎各大媒体和行研机构转载引用。但请遵守如下规则:
1.可全文转载,但不得恶意镜像。转载需注明来源(智研咨询)。
2.转载文章内容时不得进行删减或修改。图表和数据可以引用,但不能去除水印和数据来源。
如有违反以上规则,我们将保留追究法律责任的权力。
版权提示:
智研咨询倡导尊重与保护知识产权,对有明确来源的内容注明出处。如发现本站文章存在版权、稿酬或其它问题,烦请联系我们,我们将及时与您沟通处理。联系方式:gaojian@chyxx.com、010-60343812。


![2023年中国智能驾驶行业发展格局及重点企业分析:企业积极加码智驾研发,智能驾驶赛道火热 [图]](http://img.chyxx.com/images/2022/0330/99d4e8a78387e45474dcca8da0b56041c69dec09.png?x-oss-process=style/w320)

![2023年中国智能驾驶行业发展环境(PEST)分析:政策不断利好,市场竞争激烈[图]](http://img.chyxx.com/images/2022/0330/83e55e0fd01cd7eb3b56b758f35281ec8d2514ab.png?x-oss-process=style/w320)